在計算機網絡工程領域,仿真技術是驗證系統設計、分析網絡性能、確保通信可靠性的關鍵工具。Canoe(CAN Open Environment)作為一款廣泛應用于汽車電子和工業通信領域的專業仿真與測試軟件,其仿真工程在總線系統開發中扮演著至關重要的角色。本文重點介紹Canoe的第3個仿真工程,聚焦于其總線仿真的核心功能與網絡拓撲結構。
一、 總線仿真功能詳解
Canoe的第3個仿真工程通常圍繞特定總線(如CAN、LIN、FlexRay、Ethernet等)的深度仿真與測試展開。其主要功能模塊包括:
- 網絡節點仿真:可以模擬網絡中的多個電子控制單元(ECU),包括它們的行為邏輯、通信協議棧(如CANoe自帶的CAPL腳本實現)以及交互流程。用戶可以定義節點發送和接收的報文(Message)內容、周期、觸發條件等,以構建復雜的通信場景。
- 總線通信仿真與監控:該工程能夠模擬總線的物理層與數據鏈路層行為,實時仿真總線上的信號傳輸、仲裁、錯誤幀等。其強大的跟蹤窗口(Trace Window)可以高亮顯示所有網絡活動,包括報文、信號值、錯誤和事件,便于工程師進行實時監控和離線分析。
- 信號與系統變量交互:支持對報文中的信號(Signal)進行可視化操作和邏輯關聯。用戶可以通過面板設計器(Panel Designer)創建圖形化控制面板,動態修改信號值,并觀察網絡中其他節點的響應,實現人機交互式仿真。
- 自動化測試與評估:集成測試功能單元(Test Feature Set),支持編寫和運行自動化測試序列(Test Sequences),對網絡通信的時序、容錯、一致性等進行自動化驗證,并生成詳細的測試報告,評估系統是否符合設計規范。
- 診斷與協議仿真:可集成診斷功能(如UDS on CAN),仿真診斷儀與ECU之間的診斷通信,用于測試和驗證車輛診斷服務。
二、 網絡拓撲結構配置
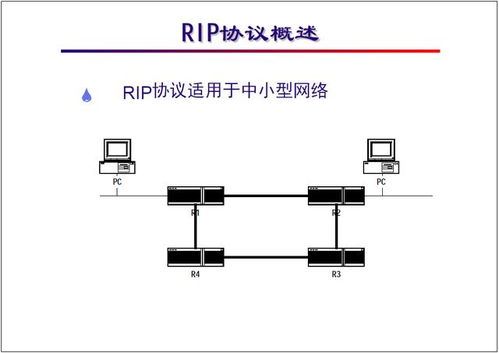
在Canoe的第3個仿真工程中,網絡拓撲的定義是仿真的基礎。它描述了網絡中各個節點(ECU仿真節點、真實ECU接口、網關等)以及總線通道之間的連接關系。配置過程主要包括:
- 拓撲圖構建:在Canoe的仿真設置界面,用戶可以通過圖形化方式拖拽組件來構建網絡拓撲。一個典型的拓撲可能包含:
- 多個仿真ECU節點(Simulated ECUs),由CAPL程序或系統變量控制其行為。
- 網絡接口硬件(如VN1600系列接口卡),用于連接真實的ECU或網絡段,實現“硬件在環”(HIL)仿真。
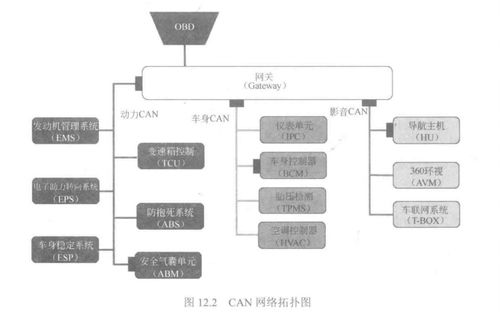
- 網關節點(Gateway),模擬在不同總線類型(如CAN和LIN)之間進行報文路由與轉換的設備。
- 總線通道(Channel),代表不同類型的物理網絡(如CAN High, CAN Low)。
- 通道與節點關聯:將每個仿真節點或硬件接口精確地分配到指定的總線通道上。例如,發動機ECU仿真節點和變速箱ECU仿真節點可能被分配到同一個高速CAN通道上,而車身控制模塊則可能被分配到一個低速CAN或LIN通道上。
- 數據庫集成:網絡通信的“語言”由數據庫文件(如DBC文件用于CAN,LDF用于LIN)定義。在工程中必須導入或關聯相應的數據庫,以便Canoe能夠正確解析和生成報文與信號,確保仿真的語義準確性。
- 系統變量與網絡綁定:定義全局或局部的系統變量,并將其與網絡信號或節點狀態綁定,實現跨節點的數據共享與同步控制。
Canoe的第3個仿真工程是計算機網絡工程實踐中一個功能強大的虛擬實驗室。它通過高度可配置的總線仿真功能和靈活的網絡拓撲建模,使工程師能夠在產品開發早期就對復雜的車載網絡或工業通信系統的功能、性能及可靠性進行全面的驗證與測試,極大地縮短了開發周期,降低了實物測試的成本與風險。掌握其核心功能與拓撲配置,是進行高效、可靠網絡系統設計與測試的關鍵技能。